Использование ROS2 моделей в построении и отладке летающих роботов PX4
Введение
С развитием технологий автоматизации и беспилотных систем, реализация высококачественных летающих роботов становится все более актуальной. Одной из ведущих платформ для разработки беспилотных летательных аппаратов (БПЛА) является PX4, открытая платформа для автономного управления дронами. В сочетании с ROS2 (Robot Operating System 2), это создает мощные инструменты для разработки и отладки различных приложений, улучшая как функциональность, так и надежность беспилотников.
ROS2 и его преимущества
ROS2 обладает рядом преимуществ по сравнению с его предшественником, ROS1. Ключевые особенности включают:
1. Поддержка распределенных систем: ROS2 обеспечивает работу в сетевой среде, что позволяет обрабатывать данные от нескольких устройств в реальном времени. Это очень важно для летающих роботов, которые могут иметь много сенсоров и вычислительных узлов.
2. Отказоустойчивость: ROS2 использует DDS (Data Distribution Service) для передачи данных, что обеспечивает надежную связь, необходимую для управления беспилотниками в критических условиях.
3. Повышенная безопасность: С ROS2 улучшены механизмы аутентификации и шифрования, что делает систему более защищенной от потенциальных атак.
4. Совместимость с различными языками программирования: ROS2 поддерживает несколько языков, таких как C++ и Python, что предоставляет разработчикам большую гибкость при выборе инструментария.
Интеграция ROS2 с PX4
Интеграция ROS2 с PX4 происходит через Middleware, который позволяет управлять полетами дрона и взаимодействовать с его сенсорами. Существует несколько ключевых компонентов для обеспечения этой связи:
1. PX4 ROS2 Bridge: Этот мост позволяет обмениваться данными между PX4 и ROS2. Он включает в себя обмен сообщениями, такими как состояния полета, данные с сенсоров и команды управления.
2. SITL (Software In The Loop): SITL позволяет разработчикам тестировать алгоритмы управления в симуляции, что особенно полезно для отладки и оптимизации перед фактическим полетом. Использование ROS2 в SITL позволяет проводить испытания алгоритмов в безопасной и контролируемой среде.
3. Модули управления: С помощью ROS2 можно легко создавать модули управления для выполнения различных задач, таких как следование за объектами, автономная навигация или выполнение заданных маршрутов.
Применение ROS2 в проектировании летающих роботов
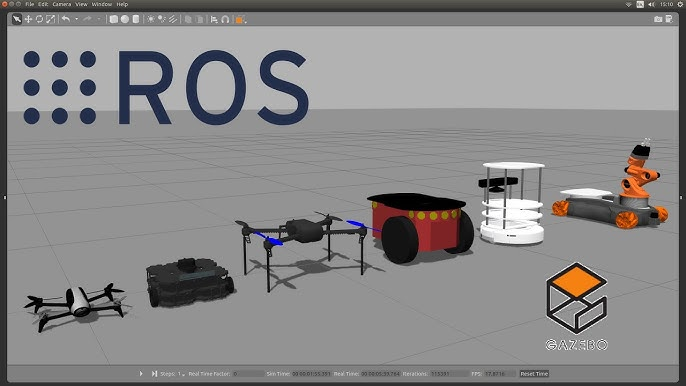
1. Моделирование и симуляция: ROS2 предоставляет мощные инструменты для 3D-моделирования и симуляции, такие как Gazebo, что помогает разработчикам тестировать и оптимизировать свои алгоритмы до начала реальных испытаний.
2. Обработка данных с сенсоров: Используя ROS2, разработчики могут интегрировать данные от различных сенсоров, таких как LIDAR, камеры и IMU, улучшая обработку информации о окружающей среде.
3. Алгоритмы машинного обучения: ROS2 позволяет легко внедрять алгоритмы машинного обучения для повышения интеллекта дронов, позволяя им адаптироваться к новым условиям и улучшать свою производительность в реальном времени.
Заключение
Использование ROS2 моделей в построении и отладке летающих роботов на базе PX4 открывает новые горизонты для исследователей и разработчиков. Это сочетание технологии улучшает надежность, безопасность и функциональность дронов, что является критически важным как для коммерческих, так и для исследовательских приложений. С учетом постоянного развития как ROS2, так и PX4, будущее летающих роботов выглядит многообещающим, позволяя реализовывать все более сложные и эффективные решения в области автоматизации и управления.