Disparity map - как машины видят глубину картинки?
Когда мы смотрим двумя глазами, мозг автоматически определяет, где ближе, а где дальше. Это называется бинокулярное зрение.
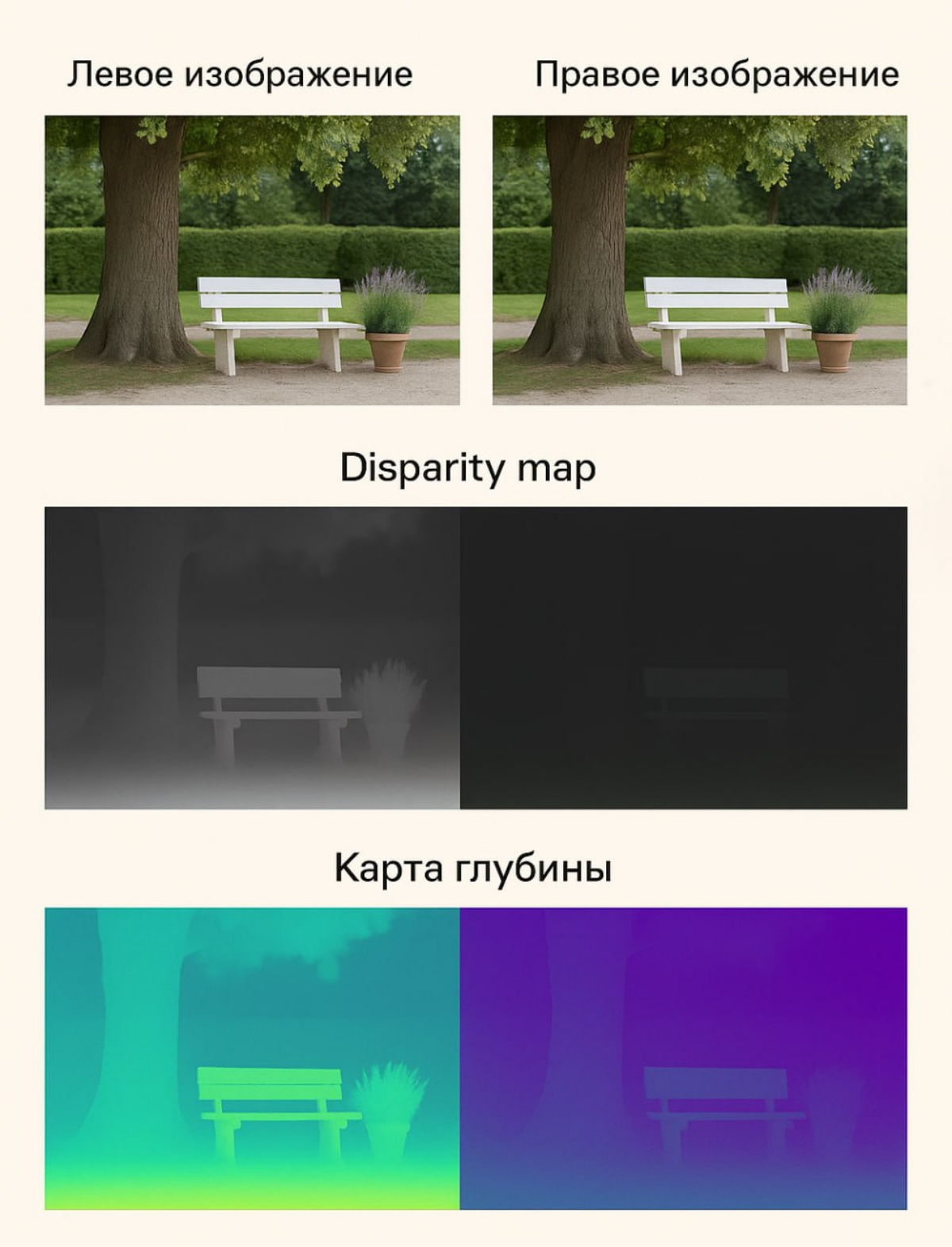
Левый и правый глаз видят одну и ту же сцену под немного разным углом.
Если закрыть один глаз, а потом другой — объекты «прыгают» из стороны в сторону. Чем ближе предмет, тем сильнее он смещается.
📌 Точно так же работает стереозрение в компьютерном зрении.
Если у нас есть два изображения одной сцены, снятых с небольшим смещением (например, с двух камер или в разное время), мы можем посчитать, насколько каждый пиксель "сдвинулся" между кадрами.
Это и есть disparity — разность в положении пикселя на левом и правом изображении.
Когда мы для каждой точки в кадре определяем такую разность — мы получаем disparity map, или карту смещений.
🟦 Чем объект ближе, тем сильнее он смещается.
🟪 Чем он дальше — тем меньше disparity.
Disparity map — это изображение, где:
яркие области (высокая disparity) — ближе к камере, тёмные (низкая disparity) — дальше. Фактически, это "карта глубины", но полученная без лидара или других дорогих датчиков. Только с помощью камеры и математики.
Где это применяется?
-
В автомобилях с автопилотом, чтобы понимать, на каком расстоянии находятся другие машины и пешеходы
-
В дронах и роботах, чтобы видеть, где преграда, а где свободный проход
-
В дополненной реальности — чтобы правильно «поставить» виртуальный объект на стол, а не в воздух
-
В 3D-сканировании, когда нужно создать модель объекта или помещения
-
В медицине, промышленности, играх, где нужно видеть "в объёме", а не просто на фото
📌 Disparity map — один из способов научить компьютер видеть не просто картинку, а трёхмерную сцену.
#компьютерноезрение #машинноезрение #cv #computervision #нейросети1